sfepy.terms.terms_jax module¶
Proof-of-concept JAX-based terms supporting automatic differentiation.
- class sfepy.terms.terms_jax.LinearElasticLADTerm(name, arg_str, integral, region, **kwargs)[source]¶
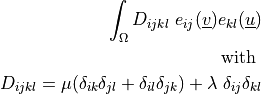
Homogeneous isotropic linear elasticity term differentiable w.r.t. material parameters
 ,
,  (Lamé’s parameters).
(Lamé’s parameters).- Definition:
- Call signature:
dw_lin_elastic_l_ad
(material_1, material_2, virtual, state)- Arguments:
material_1:
(Lamé’s first parameter)material_2:
(Lamé’s second parameter, shear modulus)virtual/parameter_1:

state/parameter_2:

- arg_shapes = {'material_1': '1, 1', 'material_2': '1, 1', 'state': 'D', 'virtual': ('D', 'state')}¶
- arg_types = (('material_1', 'material_2', 'virtual', 'state'),)¶
- diff_info = {'material_1': 1, 'material_2': 1}¶
- get_fargs(material1, material2, virtual, state, mode=None, term_mode=None, diff_var=None, **kwargs)[source]¶
- modes = ('weak',)¶
- name = 'dw_lin_elastic_l_ad'¶
- class sfepy.terms.terms_jax.LinearElasticYPADTerm(name, arg_str, integral, region, **kwargs)[source]¶
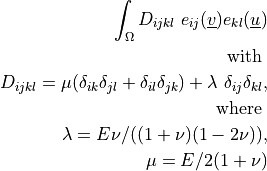
Homogeneous isotropic linear elasticity term differentiable w.r.t. material parameters
 (Young’s modulus),
(Young’s modulus),  (Poisson’s ratio).
(Poisson’s ratio).- Definition:
- Call signature:
dw_lin_elastic_yp_ad
(material_1, material_2, virtual, state)- Arguments:
material_1:
material_2:
virtual/parameter_1:
state/parameter_2:
- arg_shapes = {'material_1': '1, 1', 'material_2': '1, 1', 'state': 'D', 'virtual': ('D', 'state')}¶
- arg_types = (('material_1', 'material_2', 'virtual', 'state'),)¶
- diff_info = {'material_1': 1, 'material_2': 1}¶
- get_fargs(material1, material2, virtual, state, mode=None, term_mode=None, diff_var=None, **kwargs)[source]¶
- modes = ('weak',)¶
- name = 'dw_lin_elastic_yp_ad'¶
- class sfepy.terms.terms_jax.MassADTerm(name, arg_str, integral, region, **kwargs)[source]¶
Homogeneous mass term differentiable w.r.t. the material parameter.
- Definition:

- Call signature:
dw_mass_ad
(material, virtual, state)- Arguments:
material_1:

virtual:
state:
- arg_shapes = [{'material': '1, 1', 'state': 'D', 'virtual': ('D', 'state')}, {'state': 1, 'virtual': (1, 'state')}]¶
- arg_types = (('material', 'virtual', 'state'),)¶
- diff_info = {'material': 1}¶
- get_fargs(material_density, virtual, state, mode=None, term_mode=None, diff_var=None, **kwargs)[source]¶
- integration = ('cell', 'facet')¶
- modes = ('weak',)¶
- name = 'dw_mass_ad'¶
- class sfepy.terms.terms_jax.NeoHookeanTLADTerm(name, arg_str, integral, region, **kwargs)[source]¶
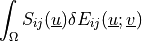
Homogeneous Hyperelastic neo-Hookean term differentiable w.r.t. the material parameter. Effective stress
 .
.- Definition:
- Call signature:
dw_tl_he_neohook_ad
(material, virtual, state)- Arguments:
material :
virtual :
state :
- arg_shapes = {'material': '1, 1', 'state': 'D', 'virtual': ('D', 'state')}¶
- arg_types = ('material', 'virtual', 'state')¶
- diff_info = {'material': 1}¶
- geometries = ['2_3', '2_4', '3_4', '3_8']¶
- modes = ('weak',)¶
- name = 'dw_tl_he_neohook_ad'¶
- class sfepy.terms.terms_jax.OgdenTLADTerm(name, arg_str, integral, region, **kwargs)[source]¶
Homogeneous hyperelastic Ogden model term differentiable w.r.t. the material parameters, with the strain energy density

where
 are the principal stretches, whose
squares are the principal values of the right Cauchy-Green deformation
tensor
are the principal stretches, whose
squares are the principal values of the right Cauchy-Green deformation
tensor  . For more details see
. For more details see OgdenTLTerm.WARNING: The current implementation fails to compute the tangent matrix when
has multiple eigenvalues (e.g. zero deformation).
In that case nans are returned, as a result of dividing by zero. See [1],
Section 11.2.3, page 385.[1] Borst, R. de, Crisfield, M.A., Remmers, J.J.C., Verhoosel, C.V., 2012. Nonlinear Finite Element Analysis of Solids and Structures, 2nd edition. ed. Wiley, Hoboken, NJ.
- Definition:
- Call signature:
dw_tl_he_ogden_ad
(material_mu, material_alpha, virtual, state)- Arguments:
material_1 :
material_2 :

virtual :
state :
- arg_shapes = {'material_alpha': '1, 1', 'material_mu': '1, 1', 'state': 'D', 'virtual': ('D', 'state')}¶
- arg_types = ('material_mu', 'material_alpha', 'virtual', 'state')¶
- diff_info = {'material_alpha': 1, 'material_mu': 1}¶
- geometries = ['3_4', '3_8']¶
- get_fargs(material_mu, material_alpha, virtual, state, mode=None, term_mode=None, diff_var=None, **kwargs)[source]¶
- modes = ('weak',)¶
- name = 'dw_tl_he_ogden_ad'¶
- sfepy.terms.terms_jax.eval_alpha_ogden(mu, alpha, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_ogden. Takes similar arguments as ceval_ogden but with additional array axes over which ceval_ogden is mapped.
Original documentation:
Jacobian of ceval_ogden with respect to positional argument(s) 1. Takes the same arguments as ceval_ogden but returns the jacobian of the output with respect to the arguments at positions 1.
- sfepy.terms.terms_jax.eval_density_mass(density, vbf, ubf, det, cu)¶
Vectorized version of ceval_mass. Takes similar arguments as ceval_mass but with additional array axes over which ceval_mass is mapped.
Original documentation:
Jacobian of ceval_mass with respect to positional argument(s) 0. Takes the same arguments as ceval_mass but returns the jacobian of the output with respect to the arguments at positions 0.
- sfepy.terms.terms_jax.eval_elasticity_l(lam, mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_l. Takes similar arguments as ceval_elasticity_l but with additional array axes over which ceval_elasticity_l is mapped.
- sfepy.terms.terms_jax.eval_elasticity_yp(young, poisson, plane, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_yp. Takes similar arguments as ceval_elasticity_yp but with additional array axes over which ceval_elasticity_yp is mapped.
- sfepy.terms.terms_jax.eval_jac_elasticity_l(lam, mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_l. Takes similar arguments as ceval_elasticity_l but with additional array axes over which ceval_elasticity_l is mapped.
Original documentation:
Jacobian of ceval_elasticity_l with respect to positional argument(s) -1. Takes the same arguments as ceval_elasticity_l but returns the jacobian of the output with respect to the arguments at positions -1.
- sfepy.terms.terms_jax.eval_jac_elasticity_yp(young, poisson, plane, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_yp. Takes similar arguments as ceval_elasticity_yp but with additional array axes over which ceval_elasticity_yp is mapped.
Original documentation:
Jacobian of ceval_elasticity_yp with respect to positional argument(s) -1. Takes the same arguments as ceval_elasticity_yp but returns the jacobian of the output with respect to the arguments at positions -1.
- sfepy.terms.terms_jax.eval_jac_mass(density, vbf, ubf, det, cu)¶
Vectorized version of ceval_mass. Takes similar arguments as ceval_mass but with additional array axes over which ceval_mass is mapped.
Original documentation:
Jacobian of ceval_mass with respect to positional argument(s) -1. Takes the same arguments as ceval_mass but returns the jacobian of the output with respect to the arguments at positions -1.
- sfepy.terms.terms_jax.eval_jac_neohook(mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_neohook. Takes similar arguments as ceval_neohook but with additional array axes over which ceval_neohook is mapped.
Original documentation:
Jacobian of ceval_neohook with respect to positional argument(s) -1. Takes the same arguments as ceval_neohook but returns the jacobian of the output with respect to the arguments at positions -1.
- sfepy.terms.terms_jax.eval_jac_ogden(mu, alpha, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_ogden. Takes similar arguments as ceval_ogden but with additional array axes over which ceval_ogden is mapped.
Original documentation:
Jacobian of ceval_ogden with respect to positional argument(s) -1. Takes the same arguments as ceval_ogden but returns the jacobian of the output with respect to the arguments at positions -1.
- sfepy.terms.terms_jax.eval_lam_elasticity_l(lam, mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_l. Takes similar arguments as ceval_elasticity_l but with additional array axes over which ceval_elasticity_l is mapped.
Original documentation:
Jacobian of ceval_elasticity_l with respect to positional argument(s) 0. Takes the same arguments as ceval_elasticity_l but returns the jacobian of the output with respect to the arguments at positions 0.
- sfepy.terms.terms_jax.eval_mass(density, vbf, ubf, det, cu)¶
Vectorized version of ceval_mass. Takes similar arguments as ceval_mass but with additional array axes over which ceval_mass is mapped.
- sfepy.terms.terms_jax.eval_mu_elasticity_l(lam, mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_l. Takes similar arguments as ceval_elasticity_l but with additional array axes over which ceval_elasticity_l is mapped.
Original documentation:
Jacobian of ceval_elasticity_l with respect to positional argument(s) 1. Takes the same arguments as ceval_elasticity_l but returns the jacobian of the output with respect to the arguments at positions 1.
- sfepy.terms.terms_jax.eval_mu_neohook(mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_neohook. Takes similar arguments as ceval_neohook but with additional array axes over which ceval_neohook is mapped.
Original documentation:
Jacobian of ceval_neohook with respect to positional argument(s) 0. Takes the same arguments as ceval_neohook but returns the jacobian of the output with respect to the arguments at positions 0.
- sfepy.terms.terms_jax.eval_mu_ogden(mu, alpha, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_ogden. Takes similar arguments as ceval_ogden but with additional array axes over which ceval_ogden is mapped.
Original documentation:
Jacobian of ceval_ogden with respect to positional argument(s) 0. Takes the same arguments as ceval_ogden but returns the jacobian of the output with respect to the arguments at positions 0.
- sfepy.terms.terms_jax.eval_neohook(mu, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_neohook. Takes similar arguments as ceval_neohook but with additional array axes over which ceval_neohook is mapped.
- sfepy.terms.terms_jax.eval_ogden(mu, alpha, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_ogden. Takes similar arguments as ceval_ogden but with additional array axes over which ceval_ogden is mapped.
- sfepy.terms.terms_jax.eval_poisson_elasticity_yp(young, poisson, plane, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_yp. Takes similar arguments as ceval_elasticity_yp but with additional array axes over which ceval_elasticity_yp is mapped.
Original documentation:
Jacobian of ceval_elasticity_yp with respect to positional argument(s) 1. Takes the same arguments as ceval_elasticity_yp but returns the jacobian of the output with respect to the arguments at positions 1.
- sfepy.terms.terms_jax.eval_young_elasticity_yp(young, poisson, plane, vbfg, ubfg, det, cu)¶
Vectorized version of ceval_elasticity_yp. Takes similar arguments as ceval_elasticity_yp but with additional array axes over which ceval_elasticity_yp is mapped.
Original documentation:
Jacobian of ceval_elasticity_yp with respect to positional argument(s) 0. Takes the same arguments as ceval_elasticity_yp but returns the jacobian of the output with respect to the arguments at positions 0.